
Our Lab
Our lab supports research in robotics and control systems with a focus on practical and impactful solutions. Equipped with modern tools, we design and test algorithms that address challenges in fields like industrial automation, medical applications, and environmental monitoring.
Lab Equipment

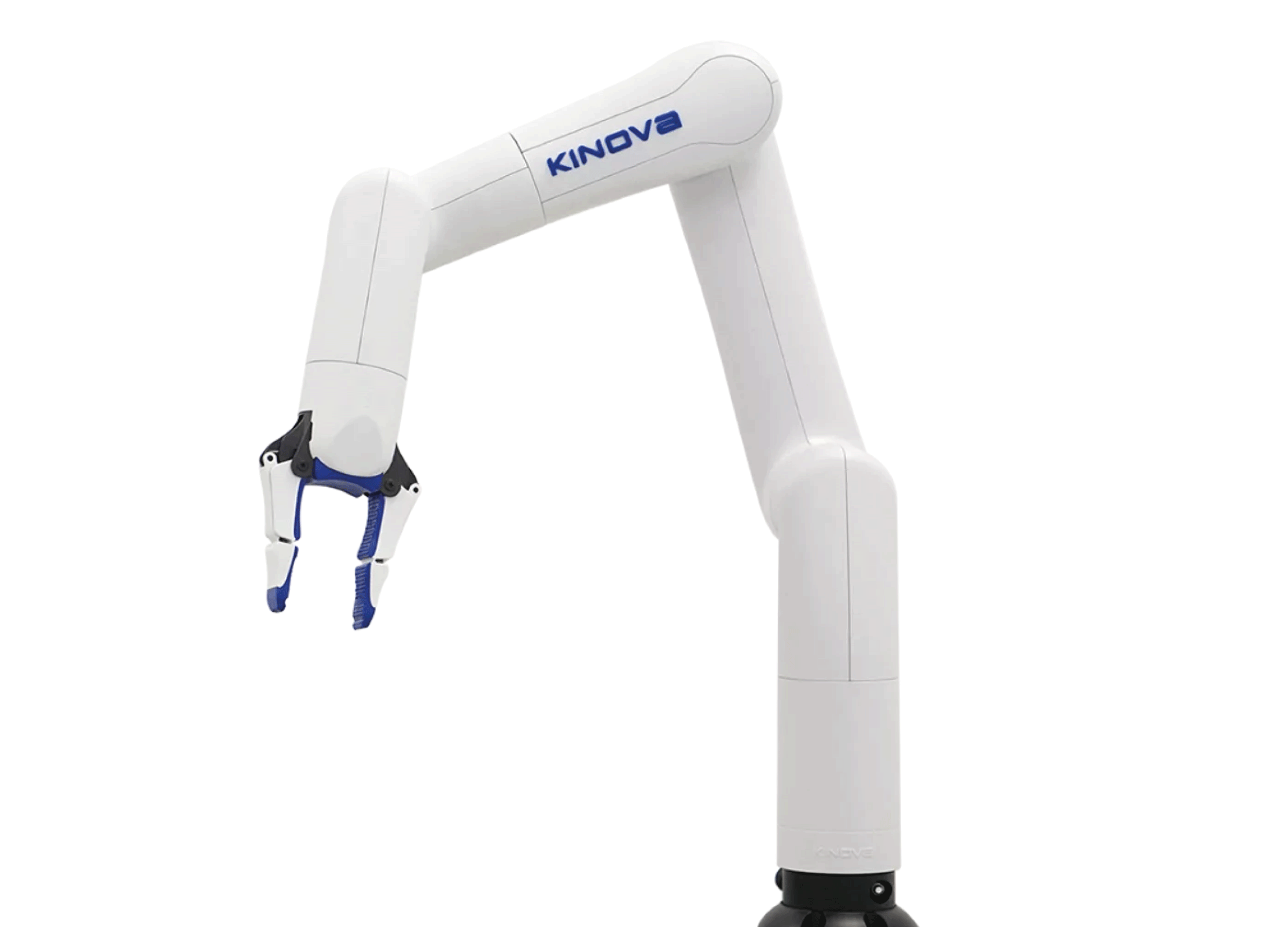
KINOVA GEN 3
Characteristics:
– Degrees of freedom: 7 DoF
– Payload: 4 kg / 8.8 lbs
– Maximum reach: 902 mm
– Weight: 8.2 kg / 18 lbs
– Power Consumption: 36 W
KINOVA GEN 3 Lite
Characteristics:
– Degrees of freedom: 6 DoF
– Payload: 0.5 kg / 1.1 lbs
– Maximum reach: 760 mm
– Weight: 5.4 kg / 12 lbs
– Power Consumption: 20 W

BAXTER
Baxter is an industrial robot built by Rethink Robotics. It is a two-armed robot with an animated face, measuring with its pedestal, it stands between 5’10» and 6’3″ tall and weighs 306 lbs.
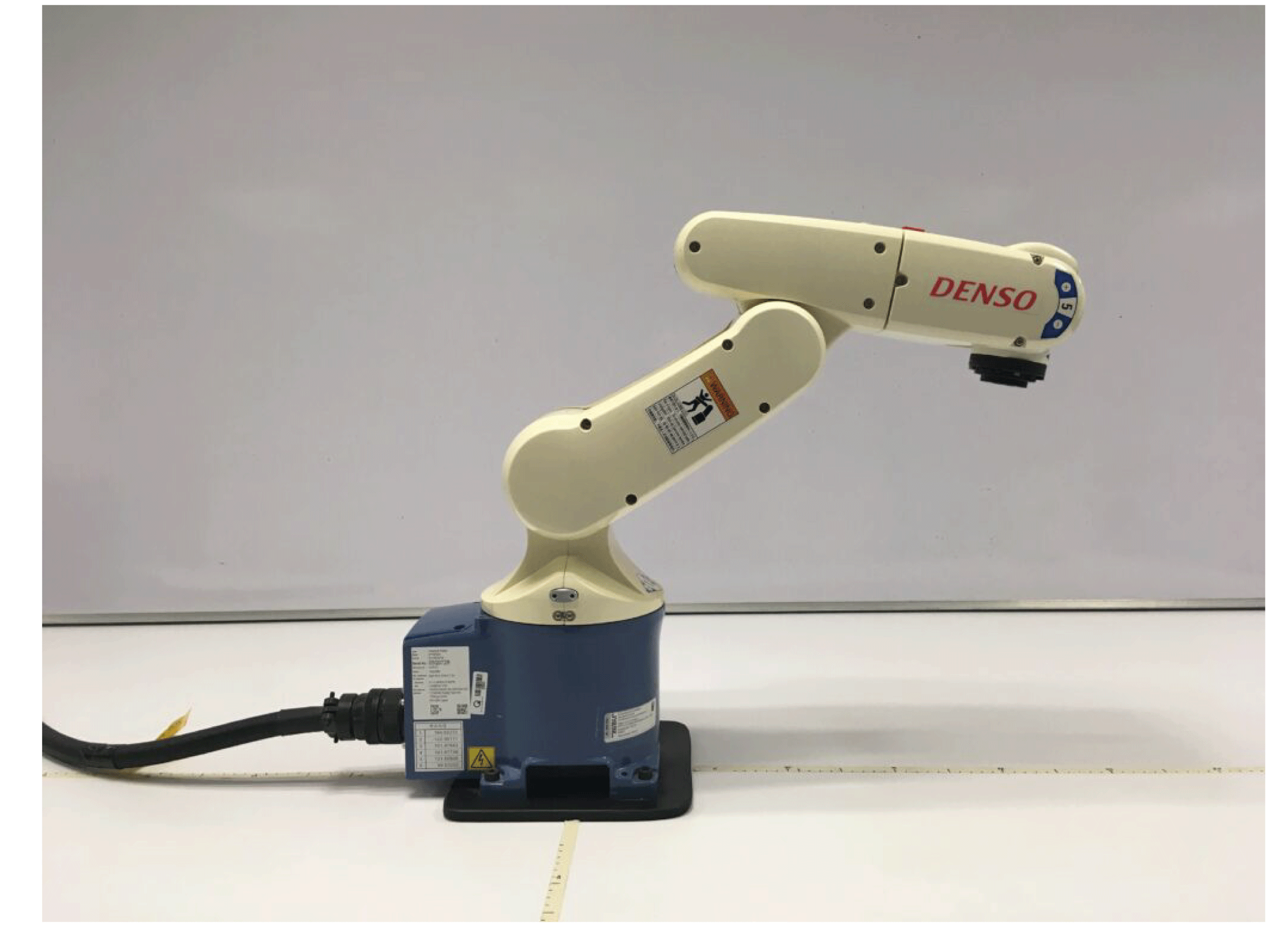
DENSO VP-6242
Characteristics:
– Degrees of freedom: 6 DoF
– Continuous payload: 2 kg
– Maximum reach: 432 mm
– Weight: 15 kg
– Repeatability: 0.02mm
– Power Consumption: 80 W

SENSABLE PHANTOM OMNI
The Phantom Omni is a portable commercial haptic device with:
– Degrees of freedom: 6 DoF
– force feedback: 3.3N
– Workspace: 16cmx12cmx7cm

Haptic device which provides a range of motion approximating lower arm movement pivoting at the elbow.This device provides three degrees of freedom positional sensing and three degrees of freedom force feedback.
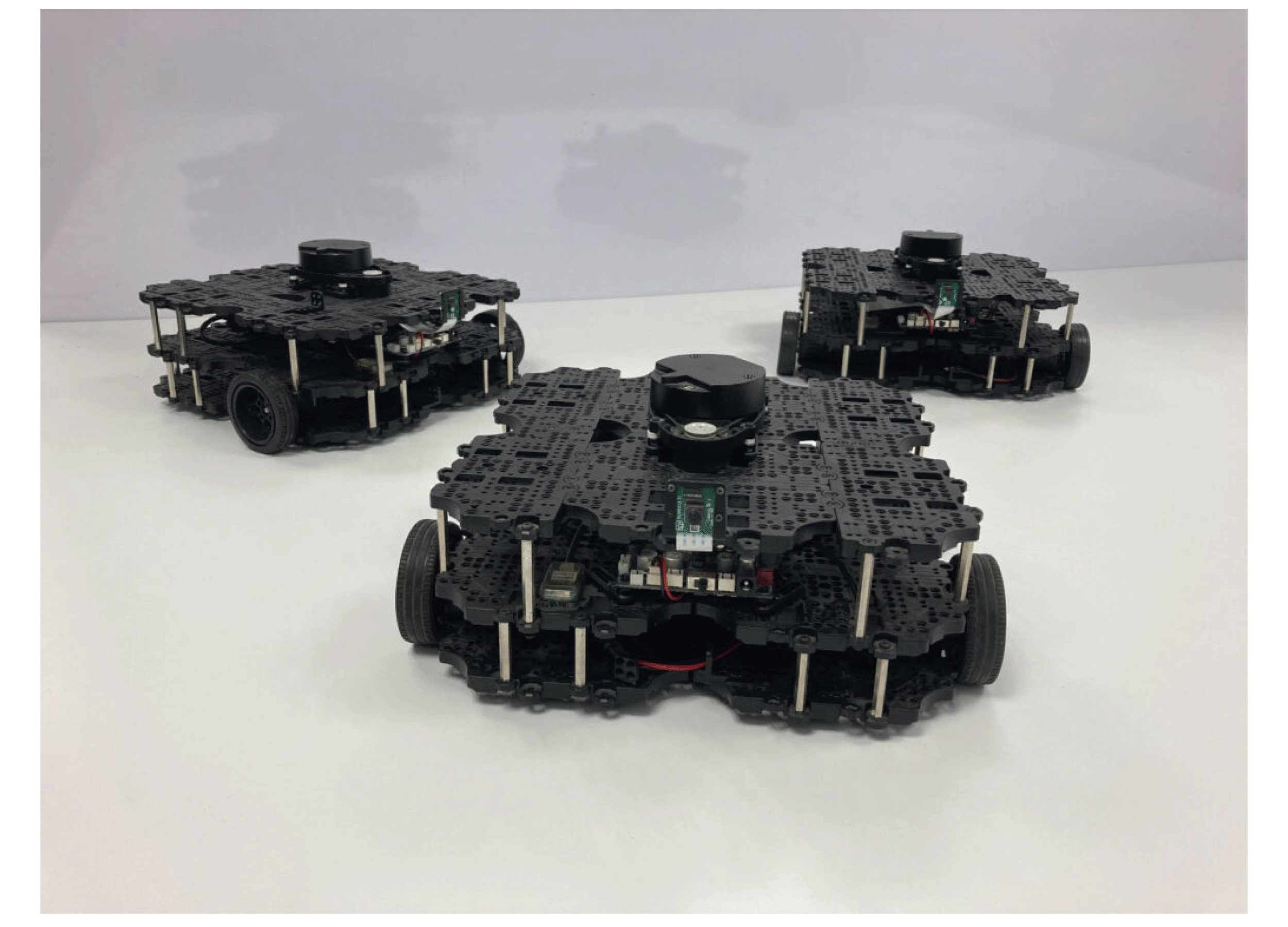
TURTLEBOT3 (WAFFLE PI)
TurtleBot3 is a new generation of modular, compact, and customizable mobile robots. It is based on the official ROS platform (Robot Operating System), a highly popular open-source software with robotic programming libraries.

OptiTrack Camera System
The Flex 13 is a medium-volume motion-capture camera (1.3 MP, 120 fps, ±0.20 mm accuracy) featuring interchangeable optics and on-camera processing—ideal for robotics and control-lab tracking.
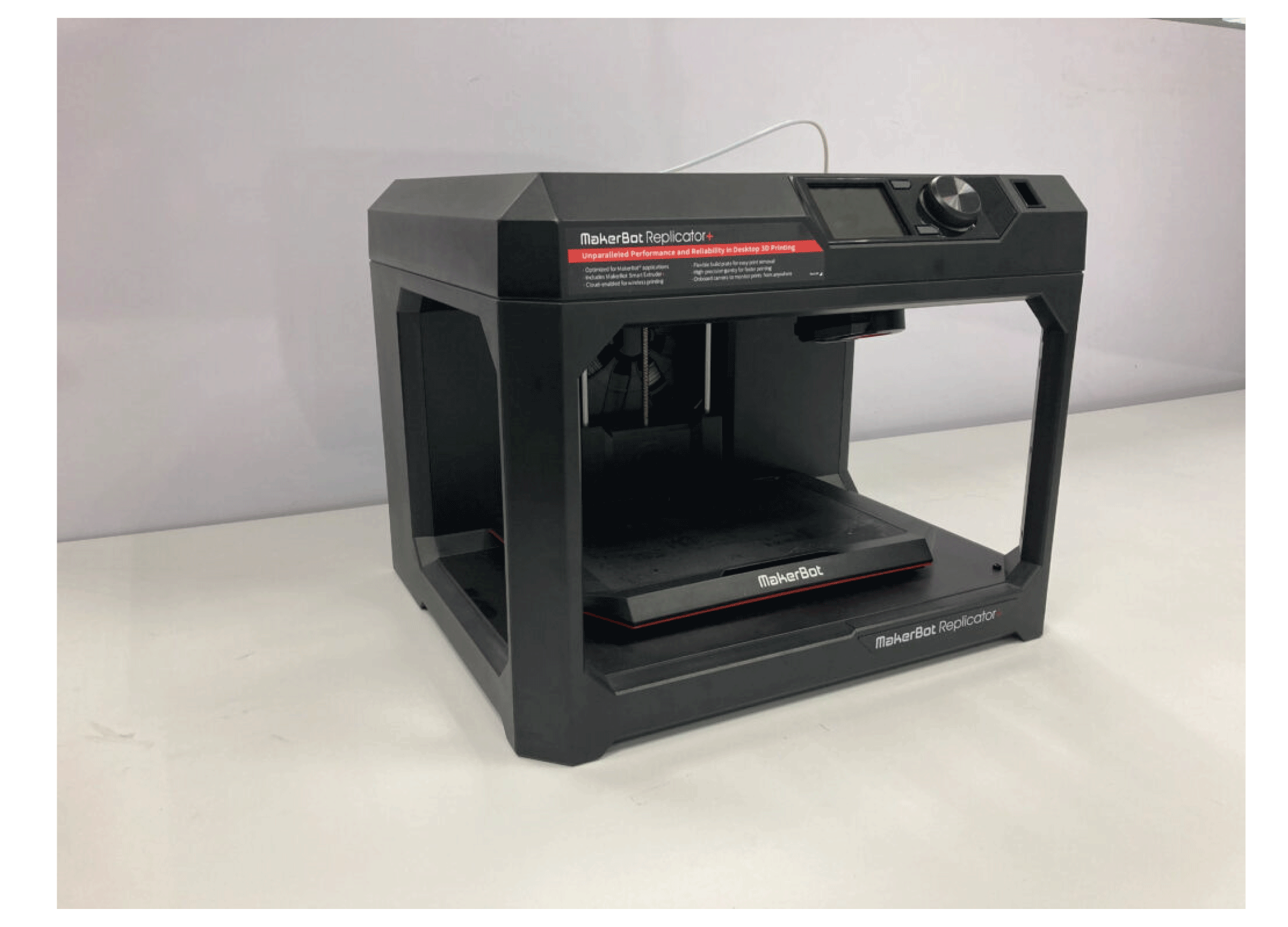
MarkerBot Replicator
The MakerBot Replicator makes solid, three-dimensional objects out of melted MakerBot PLA Filament.