
Lab Equipment
Explore our equipment below and see how we use each piece to push the boundaries of research and discovery.

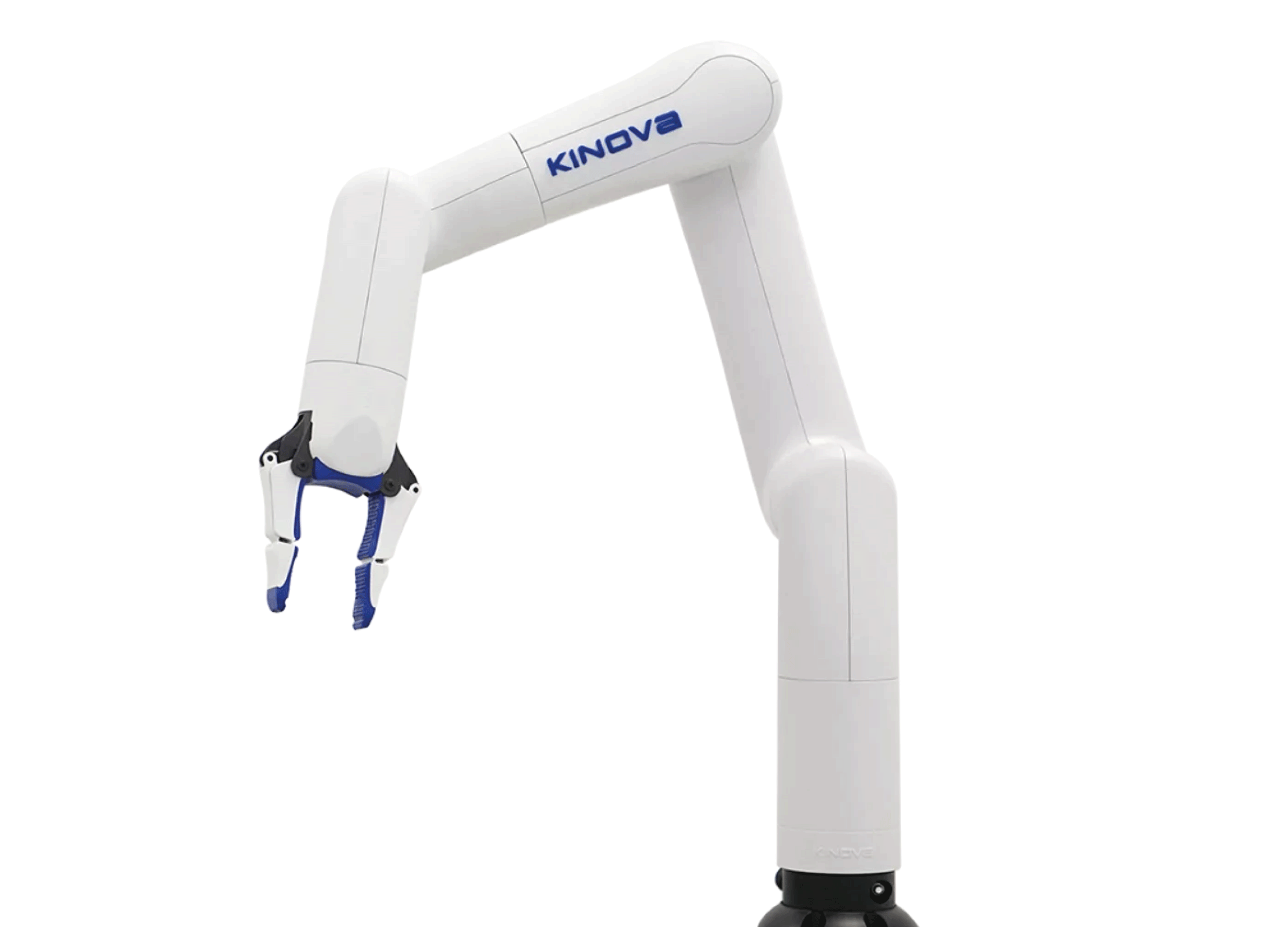
KINOVA GEN 3
Characteristics:
– Degrees of freedom: 7 DoF
– Continuous payload: 4 kg / 8.8 lbs
– Maximum reach: 902 mm
– Weight: 8.2 kg / 18 lbs
– Power Consumption: 36 W
This manipulator is a more comprehensive version compared to the Gen3 Lite, as it incorporates more features such as:
– 1 kHz closed-loop control at a low level
– Infinite rotation on all joints
– Smart actuators with integrated torque sensors
– 2D/3D vision module
While this manipulator possesses similar qualities to the Gen3 Lite and is well-suited for university-level education, it is primarily used for research due to its capabilities and diverse range of potential applications. This is because it offers:
– MATLAB hardware support package
– ROS package
– Advanced programming in C++ and Python environments
– Simulation environments Gazebo and MoveIt.
These features make it more comprehensive, enabling master’s and doctoral students to develop their teleoperation and robot consensus projects.
KINOVA GEN 3 Lite
Characteristics:
– Degrees of freedom: 6 DoF
– Continuous payload: 0.5 kg / 1.1 lbs
– Maximum reach: 760 mm
– Weight: 5.4 kg / 12 lbs
– Power Consumption: 20 W
The Gen3 Lite are professional-grade robotic arms designed for light manipulation tasks. They are perfectly suited for the educational needs at the university level, as they can be controlled both at a high level using an API and at a low level through programming in environments such as MATLAB, ROS, C++, and Python.
These robots are very useful since they are located in the manipulators’ laboratory which is primarily used by students in the Robotics Engineering program at the University of Guadalajara to study topics related to robot kinematics, dynamics, and control. Additionally, master’s and doctoral students also use them in addition to studying the aforementioned topics, they use the robots for teleoperation and consensus-related research.

BAXTER BY RETHINK ROBOTICS
The Robot Control Group’s laboratory has one Baxter.Baxter is an industrial robot built by Rethink Robotics. It is a two-armed robot with an animated face, measuring with its pedestal, it stands between 5’10» and 6’3″ tall and weighs 306 lbs.Its primary purpose in the industry was for simple industrial tasks such as loading and unloading, sorting, and handling materials. However, in the Robot Control Group Laboratory, it is used for research purposes to study its capabilities.Baxter has an animated «face» screen that allows it to display various facial expressions.There is a set of sensors on its head that enable it to detect nearby people or objects, allowing it to adapt to its environment. Baxter runs on an open-source operating system on a regular personal computer located in its chest. It also has additional sensors in its hands.
Furthermore, Baxter can be programmed by physically moving its arm to perform a task, which the computer then memorizes and can repeat. Dial, buttons, and additional controls are available on Baxter’s arm for increased precision.
The intention behind using Baxter in the laboratory is to comprehend more complex kinematic and dynamic concepts, as well as to explore potential teleoperation tasks. Above all, it provides the opportunity to work with robots that are closer to industry standards.
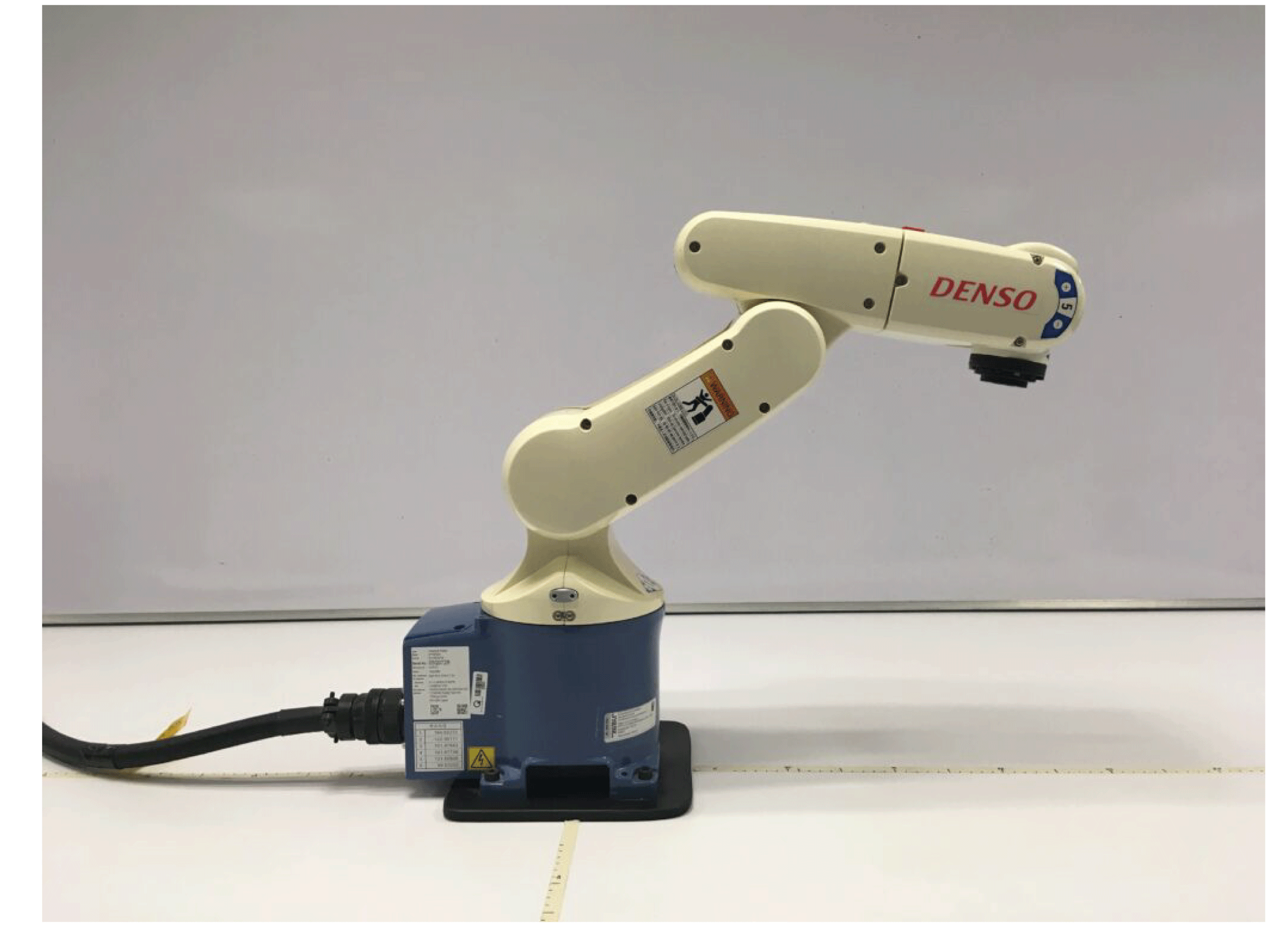
DENSO VP-6242
Characteristics:
– Degrees of freedom: 6 DoF
– Continuous payload: 2 kg
– Maximum reach: 432 mm
– Weight: 15 kg
– Repeatability: 0.02mm
– Power Consumption: 80 W
This manipulator robot is the only industrial-use robot located in the Robot Control Group’s laboratory. It boasts excellent precision of 0.02mm and features a compact design, allowing for a workspace of 160 X 160 mm.
The manipulator is equipped with high-quality components that have a long lifespan and require minimal maintenance.
This manipulator is situated in the research laboratory and, unlike the Kinova robots, is not as well-suited for educational purposes due to its lack of sufficient safety features.
Additionally, it possesses strong and fast actuators that, without proper precautions, could potentially lead to accidents. Therefore, it is solely used by master’s and doctoral students for the study of kinematics, dynamics, teleoperation, and robot consensus projects.

SENSABLE PHANTOM OMNI
Characteristics:
– Degrees of freedom: 6 DoF
– force feedback: 3.3N
– The workspace: 16 cm x 12 cm x 7 cm
The Phantom Omni is a portable commercial haptic device with six degrees of freedom (DoF) developed by Sensable Technologies. It is based on a serial architecture, meaning that the handle is connected to the housing through a single serial chain.
The workspace of the Phantom Omni measures 16 cm x 12 cm x 7 cm (width x height x depth) and can provide force feedback of up to 3.3 N. Thanks to its six DoF and a nominal position resolution of around 0.055 mm, the device is widely used in various professional environments.
This manipulator is used for teleoperation topics by master’s and doctoral students, as despite its small size, it possesses a structure similar to other manipulator robots present in the laboratory
The Robot Control Group’s laboratory has 1 Phantom Premium 1.5 haptic device which provides a range of motion approximating lower arm movement pivoting at the elbow.This device includes a passive stylus and thimble gimbal and provides three degrees of freedom positional sensing and three degrees of freedom force feedback.A 6DOF device is available for applying forces on all 6 axis.A Phantom Premium 1.5 HF (High Force) device is also available and includes a built-in gear box option that provides higher forces.

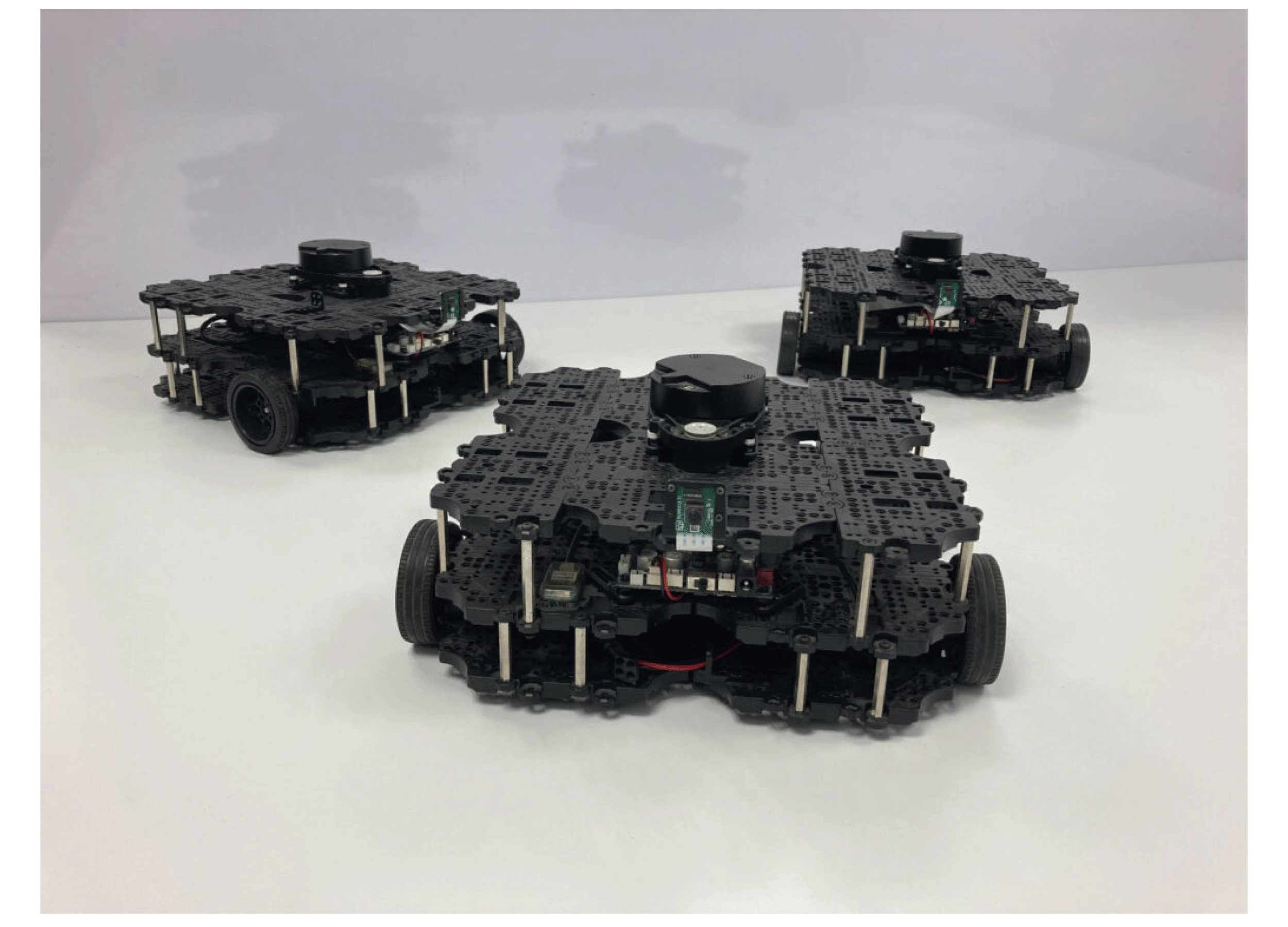
TURTLEBOT3 (WAFFLE PI)
TurtleBot3 is a new generation of modular, compact, and customizable mobile robots. It is based on the official ROS platform (Robot Operating System), a highly popular open-source software with robotic programming libraries.In the field of robotics, we can utilize the Waffle Pi, a fast robot compared to others of its kind. It is equipped with functions such as autonomous driving and SLAM (Simultaneous Localization and Mapping) which involves mapping an area for subsequent navigation. It can be programmed to interact with other robots and navigate around obstacles.
This robot is particularly suitable for studying the kinematics of ground mobile robots, as it possesses the following characteristics:
– Maximum Translation Speed: 0.26 m/s
– Maximum Rotation Speed: 1.82 rad/s (104.27 deg/s)
– Maximum Payload: 30 kg
– Dimensions: (length x width x height) 281 mm x 306 mm x 141 mm
– Weight (including batteries and sensors): 1.8 kg
– Operational Time: Approximately 2 hours
– Recharge Time: 2 hours and 30 minutes
– DYNAMIXEL: XM430-W210-T
– Raspberry Pi 3
– Controller: Open CR (32-bit ARM Cortex-M7)
– Sensors: Raspberry Pi Camera, 360-degree LiDAR, 3-axis gyroscope, 3-axis accelerometer, and 3-axis magnetometer.
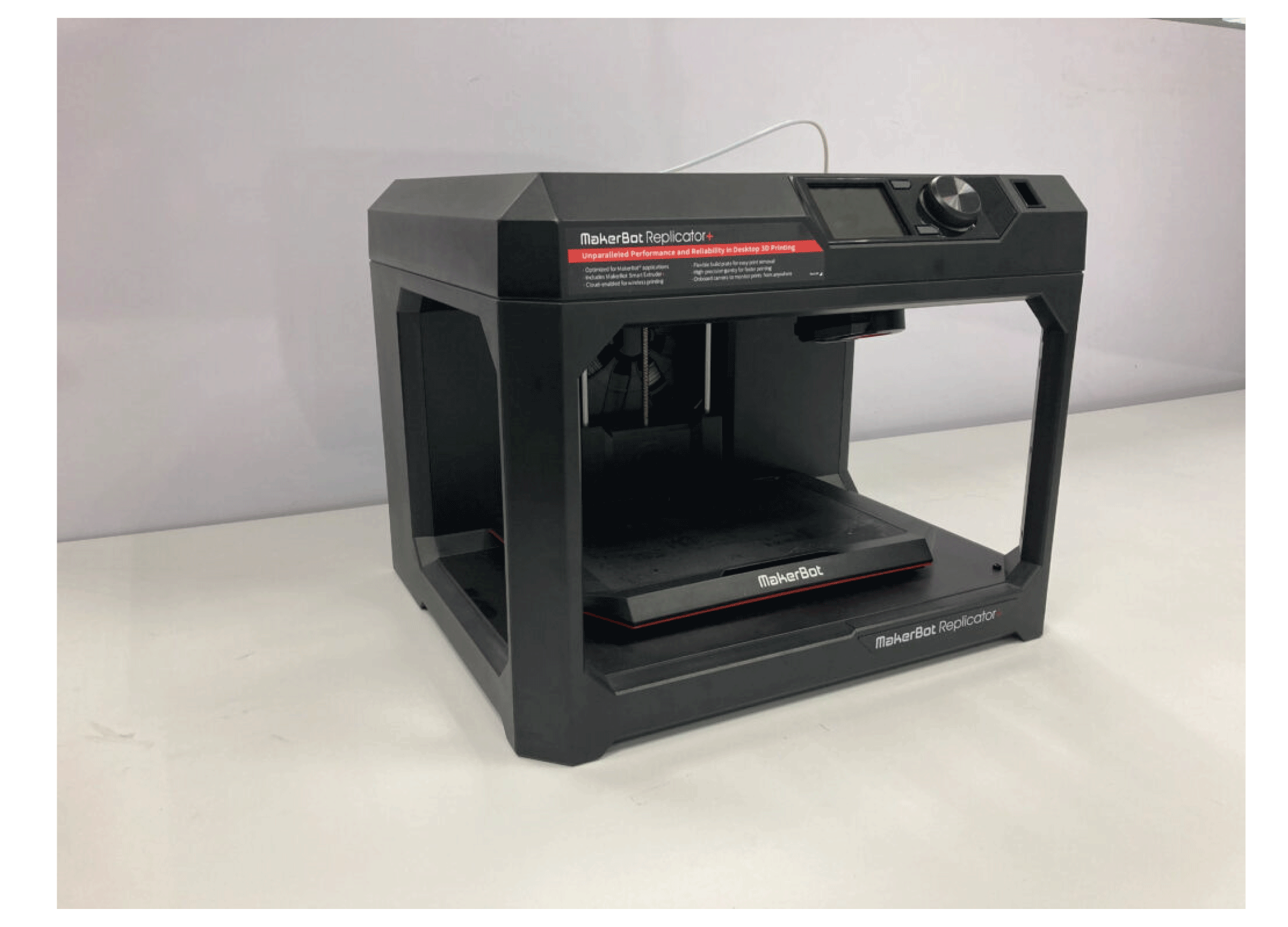
MarkerBot Replicator (3D PRINTER)
The MakerBot Replicator makes solid, three-dimensional objects out of melted MakerBot PLA Filament. First, use MakerBot Desktop to translate 3D design files into instructions for the MakerBot Replicator. Then transfer those instructions to the MakerBot Replicator via USB drive, USB cable, or your local network. The MakerBot Replicator will melt MakerBot PLA Filament and squeeze it out into the build plate in thin lines to build your object layer by layer. This method of 3D printing is called fused deposition modeling.




OptiTrack Camera System
The OptiTrack Flex 13 is a medium-volume motion-capture camera offering high precision, designed for use in research and control-lab environments. In our laboratory, eight Flex 13 cameras are arranged in a circular configuration to create a robust and accurate motion-tracking volume for robotic and experimental applications. Key features include:
- 1.3 megapixel imager, delivering over four times the resolution of earlier Flex 3 models.
- Native frame rate of 120 fps, enabling detailed motion capture of fast events.
- 3D accuracy tolerance of approximately ±0.20 mm (under specified conditions: a 9 m×9 m capture volume, 14 mm marker, exposure/gain settings, etc.).
- 56° field-of-view with the default lens, supporting large capture volumes (e.g., standard 20’×20’ / ~6 m×6 m arrangements) while maintaining high accuracy.
- On-camera image processing modes: precision object detection, selective grayscale marker images, raw/uncompressed modes, and MJPEG compression for scalable video preview and system setup.
- Interchangeable M12 lenses (e.g., 5.5 mm or 8 mm equivalents) for tailoring capture distance and pixel density; low-distortion optics and fast aperture designs (F# 1.8) for improved tracking range.
- Integration support for OEM or computer-vision applications via SDK (C/C++), enabling access to raw frames, 2D object data, camera control, and 3D tracking data.
- Infrared illumination at 850 nm (near-invisible) for unobtrusive marker tracking without visible distracting light emissions.
Overall, the Flex 13 system provides an excellent balance of performance (high frame rate, low latency, sub-millimetre accuracy) and flexibility (scalable capture volumes, lens options, processing modes), making it ideal for robotics, motion-capture, and control-lab research.